Торпеды (и морское подводное оружие) - 4
Сообщений 1 страница 30 из 272
Поделиться12020-02-07 18:02:26
- свой человек

- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
Поделиться22020-02-07 18:11:04
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
ловля торпед по-американски
Отредактировано mina (2020-02-07 18:12:02)
Поделиться32020-02-07 18:56:34
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
Submarine USS Olympia Prepare to Launch Torpedo
Опубликовано: 8 янв. 2019 г.
Sailors assigned to Los Angeles-class fast-attack submarine USS Olympia (SSN 717) prepare to launch a UGM-84 Harpoon missile during the Rim of the Pacific (RIMPAC) exercise to sink the decommissioned ex-USS Racine (LST-1191) July 12 off the coast of Hawaii. Twenty-five nations, 46 ships, five submarines, about 200 aircraft and 25,000 personnel are participating in RIMPAC from June 27 - Aug. 2 in and around the Hawaiian Islands and Southern California. The world's largest international maritime exercise, RIMPAC provides a unique training opportunity while fostering and sustaining cooperative relationships among participants critical to ensuring the safety of sea lanes and security of the world's oceans. RIMPAC 2018 is the 26th exercise in the series that began in 1971. (U.S. Navy video by Mass Communication Specialist 2nd Class Michael H. Lee/Released).
Torpedo Load to Torpedo Tube of US Navy Virginia-Class Nuclear Submarine
Опубликовано: 20 сент. 2018 г.
Sailors assigned to U.S. Navy Virginia-class fast-attack nuclear submarine Pre-Commissioning Unit Indiana (SSN 789) load a training torpedo on to torpedo tube in the torpedo room while underway. Indiana is the 16th Virginia-class submarine and is scheduled to be commissioned Sept. 29, 2018.
Поделиться42020-02-08 15:40:11
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
турки, ПТЗ
https://twitter.com/YorukIsik/status/1213830661263499273?ref_src=twsrc^tfw|twcamp^tweetembed|twterm^1213830661263499273&ref_url=https://42.tut.by/671126)
Aselsan Hızır Tanıtım Filmi
Torpedo Countermeasure System for Surface Ships aselsan HIZIR
фактически "предмет вдохновения" это
Ultra Electronics Surface Ship Torpedo Defence
aselsan ZOKA, Aselsan Acoustic Torpedo Countermeasure Decoy
ZARGANA Denizaltı Torpido Karşı Tedbir Sistemi
фактически "предмет вдохновения" это
WASS Circe C303/S

ну и самостоятельная и весьма интересная АТ
Aselsan TORK milli üretim torpido
TORK Torpidoya Karşı Savunma Torpidosu Başarıyla Test Edildi
подробнее https://topwar.ru/156666-antitorpedy-my … jajut.html
Отредактировано mina (2020-02-08 16:43:14)
Поделиться52020-02-08 16:17:22
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
Rafael Underwater Systems (в т.ч. ПТЗ)
Отредактировано mina (2020-02-08 16:17:37)
Поделиться62020-02-08 19:20:10
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
TORPEX (torpedo exercise) footage from Ticonderoga-class guided-missile cruiser USS Chancellorsville (CG-62) and Arleigh Burke-class guided-missile destroyer USS Curtis Wilbur (DDG-54) in the Philippine Sea on March 12, 2019.
Поделиться72020-02-08 19:44:04
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
P-3 Orion Torpedo Launch: Anti-Submarine Warfare Drill at RIMPAC 2016 - P-3哨戒機の魚雷投下・リムパック2016対潜水艦戦訓練
The Royal New Zealand Air Force P-3 Orion (P-3K2) maritime patrol aircraft conducting torpedo launch operations in anti-submarine warfare drills during Rim of the Pacific (RIMPAC) 2016.
Поделиться82020-02-08 19:48:52
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
Canadian Navy sub HMCS Victoria sinks U.S. Navy ship USNS Concord as part of a live-fire exercise in the Pacific on 7/17/2012. The Victoria fired one MK-48 torpedo.
Поделиться92020-02-08 20:27:19
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
торпедная палуба ТРАФАЛЬГАРА
Поделиться102020-02-08 20:28:46
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
учатся вытаскивать торпеды
U.S. Navy & Coast Guard • Extreme Cold Water Dive Under Ice
U.S. Navy and Coast Guard divers execute a dive under an ice flow in the Arctic Ocean during Ice Exercise (ICEX) 2016 at Ice Camp Sargo on March 10, 2016. Units - Mobile Diving and Salvage Unit 2, Regional Dive Locker West and Regional Dive Locker Pacific
и ... кто на фото, пояснять, полагаю не надо
1970г.
Поделиться112020-02-08 20:37:15
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
Submarine POV Torpedo launch
Video shows a MK48 "Dummy" being launched from a Dutch Submarine. This footage was partially used by RTL7's "Onderzee" documentary.
The dummy has no Controls, Warhead or Sonar and floats to the surface once launched. The 7 Meter long torpedo is being accelerated up to 2G and shortly surfaces for pickup.
You can hear beeps, these are nearby sonar transmissions and eventually the Torpedo will activate it's beacon for position broadcasting.
Поделиться122020-02-14 19:36:45
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
«Ихтиозавр» прошел Государственные испытания.
https://mina030.livejournal.com/16252.html
Поделиться132020-02-14 20:25:58
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
комменты к Торпеды-3
- Боря! С каких пор рпкСН стали выполнять БУ НТ-4. Если не изменяет память, то только НТ-3 и ПТ-3. С уважением, Ф-3 13 дпл 80-х.
- в этом и уникальность истории. Такая была нестандартная задача для РПКСН от Генерального штаба МО. Ни одна тактическая лодка не поразила цель. Стратег это сделал.
Со слов адмирала Чиркова, командира 41 дивизии, потом 11 флотилии на юбилее 41 армии: "Одну вашу торпеду поразившую цель нарисовали многоцелевой лодке, чтобы весь Флот вытянуть". Считайте, вы тоже попали. А Виталий Федорин Красную звезду получил заслуженно.
Отличный рассказ! Сам служил с в 90х 10 лет на 667бдр, Камчатка, 25 дивизия, дорос до до КБЧ-7. 5 боевых служб, десятки КБР-Т, МВУ-106 "Алмаз" - до боли родное железо. Но вот так, чтобы одну торпеду в УМЦ, а вторую с углом на дистанции - я в шоке, это высший пилотаж. Почему мы не знали об этой стрельбе, это же уникальный опыт?! Стрельба по "Баку" - снимаю шляпу! Здесь в комментариях писали, что РПКСН не выполняли НТ-4, так вот, мы тоже выполняли. Когда в конце 90х на КШУ флоту нужно было сделать атаку ОБК, а ни один из "барсов" не смог выйти в море по техническим причинам. "Батонам" стрельбу не доверили из-за низкой наплаванности и уровня подготовки. По ОБК (куда смогли собрать СКР и два МПК, ничего крупнее под рукой не оказалось) стреляла "506"-я БДР. На сколько помню, наведение было у обоих торпед, но как показали расшифровка и расчёты, не на главную цель. Увы уровень подготовки к концу 90х просел сильно, даже нам, молодым офицерам это было понятно.
Поделиться142020-02-14 20:38:06
- свой человек

- Зарегистрирован: 2018-08-02
- Сообщений: 3248
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
1 месяц 9 дней - Последний визит:
2023-11-27 15:47:16
«Ихтиозавр» прошел Государственные испытания.
https://mina030.livejournal.com/16252.html
Хотел спросить про телеуправление, потом думаю, дай дочитаю

Поделиться152020-02-14 21:10:26
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
Хотел спросить про телеуправление, потом думаю, дай дочитаю
часть вины за это есть и на мне ...
можно было продавить в свое время
Поделиться162020-02-14 21:20:06
- свой человек
- Зарегистрирован: 2018-08-02
- Сообщений: 3248
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
1 месяц 9 дней - Последний визит:
2023-11-27 15:47:16
timokhin-a-a написал(а):
Хотел спросить про телеуправление, потом думаю, дай дочитаю
часть вины за это есть и на мне ...
можно было продавить в свое время
Щас дави.
Поделиться172020-02-15 08:36:39
- втянувшийся

- Зарегистрирован: 2019-09-14
- Сообщений: 93
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
11 дней 0 часов - Последний визит:
2022-11-18 13:52:22
часть вины за это есть и на мне ...
можно было продавить в свое время
Максим, а цена в 100 лямов за рыбку - это нормально?
Поделиться182020-02-15 11:17:10
То есть у нас даже в теории не будет унифицированной 21 дюймовой торпеды? А будет электрическая и тепловая? А ну да традиции зоопарка у нас богатые.
Поделиться192020-02-15 13:53:15
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
>а цена в 100 лямов за рыбку - это нормально?
смотря что и как считать
по уму "Ихтиозавр" мог быть много дешевле, но ... "комплектуха", например та же отстреливаемая штанга АРВД - это почти 2 ляма (!!!! - см. "дискуссию" на Русарми по разъемам), и она нахрен не нужна, без нее замечательно обходились стреляя с отрывным кабелем (по "американской схеме")
с другой стороны французская F21 стоит в 2 раза дороже ... а вопрос сопоставления цен ракет и торпед довольно интересен, стоимость того же "Тома" и МК48 - примерно 1:2, примерно также и для "Скальпа" и F21
>То есть у нас даже в теории не будет унифицированной 21 дюймовой торпеды? А будет электрическая и тепловая? А ну да традиции зоопарка у нас богатые.
сначала определись - что тебе надо - эффективность или "все под одну гребенку"
Отредактировано mina (2020-02-16 11:37:53)
Поделиться202020-02-16 09:19:37
- втянувшийся
- Зарегистрирован: 2019-09-14
- Сообщений: 93
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
11 дней 0 часов - Последний визит:
2022-11-18 13:52:22
«Ихтиозавр» прошел Государственные испытания.
https://mina030.livejournal.com/16252.html
Вопрос немножко дурной - а как так Дагдизель еще в 18 году получил контракт на 73 УЭТ-1
https://bmpd.livejournal.com/3107834.html
а ГОСы торпеда прошла только сейчас?
Поделиться212020-02-16 11:37:34
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
а как так Дагдизель еще в 18 году получил контракт на 73 УЭТ-1
примерно также как и "Регион" получил контакты на "пакеты"
как это выглядело по "Ответу" писал здесь Партагеноссе (многое не договаривая, естественно  )
)
и, кстати, здесь же будет очень уместно вспомнить "преснопамятную БулаФУ" 
кстати, Вы об этом "мадам Грицацуеву"  спросите (без привязки к конкретным образцам, ибо по тематике РАВ - тоже "не может не быть" такого) по потом
спросите (без привязки к конкретным образцам, ибо по тематике РАВ - тоже "не может не быть" такого) по потом поржем почитаемС что он (3,14с - так будет точнее, ибо далеко не факт что у этой "Грицацуевой" "в трусах" "мадам") "скажет" 
Отредактировано mina (2020-02-16 12:00:59)
Поделиться222020-02-16 15:23:09
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
"залп от 3 дивизиона"
быль
78 экипаж, еще Головчанского (очень опытный и мудрый Командир из "старой гвардии"), БП в полигонах Авачинского залива с Ю.В.Кирилловым
народ мягко говоря заиПавшийся (от "кипящей энергии" ЮВК), "ропщут" даже механики, а по "люксам" и речи нет - "сплошная БГ1" (у Ю.В.К. была "добрая привычка" когда "дневные мероприятия" БП в море переходили "на самое вкусное" ближе к вечеру и в ночь (противолодочные тактические учения, отработки корабельного боевого расчета и т.д.), оказавшись однажды в таком режиме в течении очень длительного времени (в полигонах были больше 3 недель, из них недели две с ЮВК на борту), в себя после этого приходил с неделю (из которых больше двух суток просто непрерывный сон)
78 экипаж был достаточно "борзым" (дословно от одного из его старпомов - "если в 78 экипаже гармонист с гитарой в костер не падает, значит пьянка не удалась"  ) и начал активно "прессовать" зама что бы он "вписался" и "защитил" экипаж от ЮВК (естественно "предвкушая" последующее - т.к. все все знали и понимали что будет)
) и начал активно "прессовать" зама что бы он "вписался" и "защитил" экипаж от ЮВК (естественно "предвкушая" последующее - т.к. все все знали и понимали что будет)
центральный, ближе к вечеру зам подходит к ЮВК и начинает "плакаться" "как люди устали"
Кириллов к Головчанскому:
- А что люди действительно устали? А ну-ка объявите перерыв. НА ПЯТНАДЦАТЬ МИНУТ.
в общем - http://shturman-tof.ru/Smile/Smile_2/Smile_2_5.htm
прикомандированным КДЖ для отработки с ними ходил Петя Колосов (в будущем КБЧ-5 "Нерпы"), он умный и хохмач, - "ах так!!!"
пару дней спустя ЮВК, наконец-то, высаживают на буксир в Саранке ... "3 дивизия" (дивизион живучести) уже "на товсь!", и ... в момент перехода ("перешага") ЮВК на буксир продуваются (хорошим давлением ) все баллоны гальюнов
взгляд ЮВК с буксира на Командира Головчанского был, как говорят, "очень пронзительный"
НО - вслух ЮВК ничего не сказал - наверно в этом момент "слегка растерялся" 
Отредактировано mina (2020-02-16 16:07:44)
Поделиться232020-02-19 21:53:05
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
с авиабазы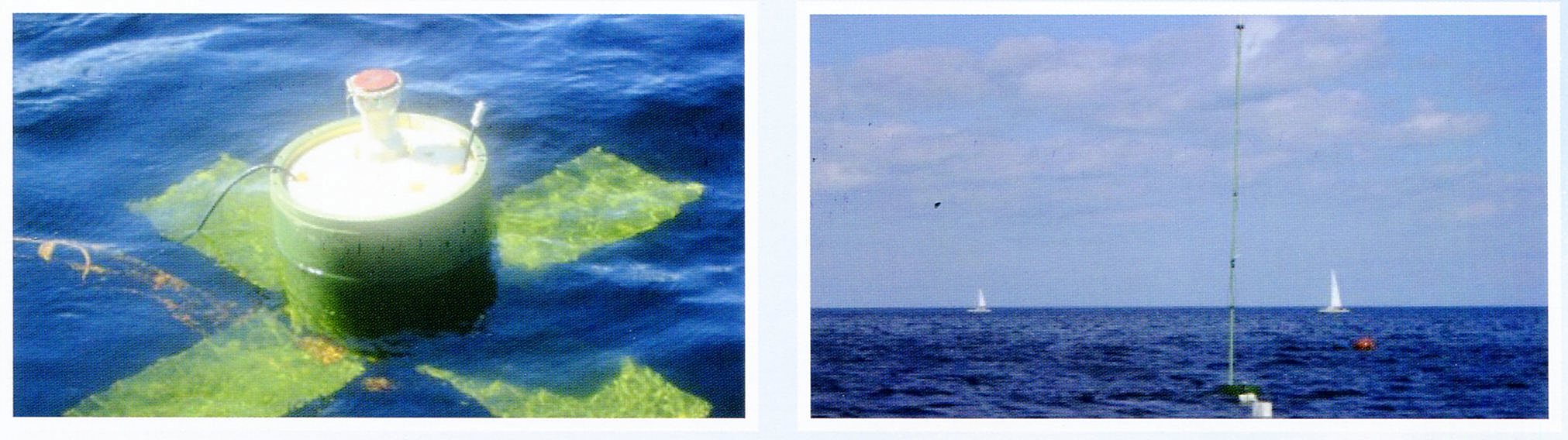
дрейфующий прибор РЭП каналов связи авиационных средств наблюдения противника Бурак-М
Поделиться242020-03-03 11:28:00
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
Отдел Маслюкова Г.Р. в то время выполнял опытно конструкторскую работу (ОКР) в качестве смежника ГСКБ-47. ГСКБ-47 занимался разработкой авиационных противолодочных подводных ракет для оснащения противолодочных самолетов и вертолетов (по темам «Пурга» и «Кондор»). В соответствии с Постановлением правительства 1111/463 «О средствах противолодочной обороны». Головным исполнителем по ракете было определено ГСКБ-47, по системе управления - ЦНИИ-173, нашему предприятию была поручена ОКР по разработке неконтактного гидроакустического взрывателя. В отделе Маслюкова Г.Р. было несколько лабораторий, в которых была распределена разработка всего заказа по ОКР. Лаборатория Грекова Ю.Н. была ориентирована на проведение климатических и натурных испытаний, как отдельных блоков, так и изделия в целом. Целью испытаний было предоставление доказательств заказчику соответствия полученных тактико -технических характеристик разработанного изделия заданным требованиям.
Для выполнения порученных работ лаборатории Грекова Ю.Н. надо было проводить испытания изделия, как на предприятии, так и в море. Ни испытательной базы, ни специального обслуживающего персонала на предприятии в то время не было. Все надо было организовывать с нуля. Многочисленные группы инженеров разработчиков изделия и оснастки для испытаний по нескольку месяцев, меняя друг друга, весь возможный для испытаний сезон находились на полигоне в в/ч Котова, в Феодосии, определенной, как испытательная база по этим темам. Из-за отсутствия навыков, опыта работа шла медленно, неквалифицированно, что сказывалось па результатах. Новизна запланированных работ предполагала для проведения тех или иных испытаний принимать пионерские не опробованные методики. Так, для проверки на несрабатывание гидроакустического взрывателя от волнения моря, была предложена методика, в которой предусматривалась установка изделия на дно моря, на глубину 50 метров (минимальная глубина движения торпеды при наведении), с периодическим включением изделия в работу и регистрацией необходимых параметров. Для проверки срабатывания изделия в боевом применении от борта подводной лодки применялась методика подводного скутера, управляемого подводным пловцом с аквалангом.
Проведение этих испытаний было поручено лаборатории Грекова Ю.Н. Был составлен план-график проведения работ и расписаны исполнители. Мне поручена была работа по проверке на несрабатывание нашего изделия от волнения моря - автономный герметичный контейнер (Бочка) с источником питания и аппаратурой регистрации необходимых параметров. Работа показалась мне очень интересной и я, засучив рукава, приступил к ее выполнению. Каждого этап проектирования, изготовления макета и методику испытания необходимо было согласовать с военным представителем капитаном 3 ранга Дементом В.И. и защитится на техническом совете в отделе. Это очень дисциплинировало, как по срокам так и по полноте решения поставленных задач. Радость переполняла мое тщеславие, так как было поручено серьезное дело с выходом на результат при натурных испытаниях в Черном море. Как всегда, не хватало времени на реализацию согласно план-графика, приходилось задерживаться после работы. В то время это было обычной практикой, благо я не был обременен семьей. Все работы крутились вокруг подводного автономного контейнера Бочка. Приборный состав контейнера определился задачами , которые необходимо было решить. Для этого в верхней части герметичного контейнера, изготовленного из металла, крепилась часть изделия с гидроакустической антенной - передатчиком, приемником и исполнительным устройством. Эта часть с помощью герметичного кабельного ввода соединялась с внутренней начинкой. Внутри контейнера располагались - блок питания изделия, в виде аккумуляторного отсека, блок автоматики, с программой временного включения/выключения изделия и регистратор необходимых параметров. Из комплектующих были применены: серебренно-цинковые аккумуляторы большой емкости – СЦК-45, германиевые транзисторы КТ 13Б, МП26А, силовые электро-механические реле – РЭС9. В качестве регистратора был применен многоканальный гальванический шлейфовый авиационный фоторегистратор. Все приборы составляющие начинку контейнера по заданному алгоритму включались/выключались в течении недели. Контейнер устанавливался на дно Черного моря в районе мыса Казантип.Для этой работы использовался водолазный катер - ВРДМ и водолаз с погружением на глубину 50 метров. Было изготовлено два контейнера и каждую неделю происходила смена начинки на борту водолазного катера по месту проведения работ на полигоне. Испытания проходили в летнее время, когда позволяли погодные условия, на базе в/ч в Феодосии. В результате работ в 1963-64 годах были получены фотоматериалы от регистратора, по которым я отчитывался на ученом совете предприятия.
Работы по подводному скутеру началась с разработки эскизного проекта и его защиты. Ведущим был назначен конструктор Егоров В.Н. выпускник Бауманского института. Мне была поручена работа, связанная с регистрацией необходимых параметров, обработка полученных результатов и изготовление документального фильма по методике испытаний. Изготовлен подводный скутер был на предприятии и доставлен в в/ч в Феодосии. Для обучения подводных пловцов, которые могли управлять скутером, был заключен договор с Московским клубом аквалангистов, имеющим базу на Черном море. База располагалась в уютной бухте, между Судаком и Новым Светом. Часть сотрудников отдела Маслюкова Г.Р. прошла подготовку по программе подводного пловца с аквалангом, в том числе и я, и все получили соответствующие сертификаты.
Работы со скутером проводились на полигоне, который располагался недалеко от базы в/ч Котова города Феодосия. В испытаниях была задействована подводная лодка 627 проекта. С переменным успехом работа шла с участием военпреда от в/ч Котова - капитана 3 ранга Соколова Л Н. курировшего наше предприятие по морским делам. Так как опыта проведения подобных работ у предприятия и в/ч не было испытания проходили медленно и был задействован весь личный состав лаборатории Грекова Ю.Н. в течении 1964-65 годов. Результатом всех работ был отчет, который с удовлетворением был принят заказчиком. На методику была подана авторская заявка во ВНИИГПЭ и получено авторское свидетельство. В описании аторского свидетельства, кроме текстового материала, был представлен документальный анимационный фильм, поясняющий методику. Фильм был снят мной в соавторстве с инженером Кравченко В.И. Для производства анимационного фильма мной была доработана штатная репортерская кинокамера КОНВАС, в части электронного дистанционного управления по кадровой съемки объекта.
Окрыленный успехами коллектива при проведении работ по теме «Кондор», Маслюков Г.Р. в дальнейшем замахнулся на исследовательскую работу по поиску методов и устройств наведения движущегося подводного объекта на ПЛ. Для реализации этих работ были определены методика и состав необходимого оборудования. Я был назначен ведущим по этим работам. Для исследования необходимо было получить в активном режиме видеоимпульсы отраженных сигналов от ПЛ. Для того, что бы создать такую картотеку, надо было собрать изображения видеоимпульсов отраженных сигналов на разных частотах, с различных дистанций, с разных курсовых углов, на различных скоростях хода ПЛ. Зондирующие импульсы посылались передающей антенной с изменяемой диаграммой направленности, разной величины по длительности, на разных частотах. Отраженные имульсы принимались приемной антенной и через усилительное устройство передавались на зкран осциллографа, с которого фотографировались кинокамерой КОНВАС.
Работа проходила на полигоне в/ч Феодосии. В ней участвовали: ПЛ проекта 613, специальное судно ГКС 17, поворотное устройство, на котором были смонтированы приемная и передающая антенны. В качестве регистратора была использована, мной доработанная кинокамера КОНВАС, для по кадровой съемки, огибающей отраженного сигнала с экрана осциллографа ЭНО 1. Для удержания отраженного импульса в центре экрана электронного осциллографа, установленного в ждущий режим, мной был разработан интегратор на полупроводниковых приборах, выдававший по зондирующему импульсу, сигнал на осциллограф с необходимой текущей задержкой. Полученные результаты были оформлены в виде отдельного документа и защищены на отраслевом ученом техническом совете МОП.
В 1967 году предприяте проводило государственные испытания по сдаче заказчику управляемых глубинных бомб. Испытания должны были проводится в Японском море на базе в/ч МТУ ТОФ. Для этого была сформирована группа сотрудников предприятия во главе с главным инженером предприятия Соколовым Л. В. В работах должна была принимать участие ПЛ проекта 671. Маслюков Г.Р. решил воспользоваться редкой возможностью проверки работы неконтактного гидроакустического взрывателя (изделия по теме «Кондор») по реальной ПЛ, для этого я был включен в состав командированных для госиспытаний. Для проведения работы в интересах испытаний нашего изделия была использована доработанная, ранее изготовленная Бочка. Бочку с реальным изделием необходимо было опускать рядом с бортом, проходившей атомной ПЛ. Изделие опускалось на кабель – тросе. Регистрация сигналов от изделия проводилась на шлейфовом регистраторе на борту ГКС. Работа была закончена с положительными результатами.
За работы по созданию неконтактного гидроакустического взрывателя для авиационных противолодочных подводных ракет для оснащения самолетов и вертолетов (тема «Кондор») Маслюков Г.Р. был удостоен Государственной премии СССР.
В 1968 в соответствии с отраслевым назначением 1-го Управления МОП, в которое входило наше предприятие, отделу Маслюкова Г. Р. была поручена работа по создания боеприпасов, использующих различные физические принципы. Мне предложили исследование по созданию акустического взрывателя для дистанционного минирования предполагаемых трасс прохождения бронированной самоходной военной техники. Был создан макет изделия, в котором в качестве антенны приемопередающего устройства использовалась керамика. Макет прошел полигонные испытания и было принято решение на разработку эскизного проекта изделия.
В 1964 году я обзавелся семьей, переехал на жительство в город Москва. В 1968 году у меня родилась дочь. На работу из Москвы в Балашиху ездить стало тяжело и, найдя работу в Москве, в п/я В 8670, я с 13 сентября 1968 года приступил к работе старшим инженером на новом месте.
Поделиться252020-03-03 11:29:08
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
В июле 1968 года я был командирован по теме Кондор в в/ч города Феодосия. Наш куратор от в/ч Котова - Соколов Л.В, тогда капитан 3 ранга, для экономии расходования плавсредств в/ч часто совмещал работы п/я 4525 с работами ЦНИИ 173. Работы от ЦНИИ 173 проводили сотрудники лаборатории Минаева А.В. Оказалось, что цели наших работ, совпадали по многим параметрам. Минаеву А.В. понравились наши подходы к исследованию структуры отраженных видеосигналов от борта идущей и находящейся на стопе подводной лодки и особенно он был заинтересован набором оборудования, который был использован нами в работе. Ему понравилось использование нами различных видов керамики на основе титаната бария. Взяв «быка за рога» он предложил некоторым сотрудникам нашего предприятия перейти на работу в ЦНИИ 173, с прицелом на проведения таких же работ, но, уже в интересах работ, проводимых его лабораторией. Взвесив все за и против, я и Чернов И.В., к тому времени, жившие в Москве, и, ездившие ежедневно на работу в Балашиху, согласились на перевод из Балашихи в Москву. А так как наши предприятия были в одном министерстве (МОП), перевод прошел быстро и без волокиты. Так я стал сотрудником ЦНИИ 173 в должности старшего инженера. На новое место работы вышел 13 сентября 1968 года, получил пропуск и занял рабочее место на 2 объекте ЦНИИ173, в лаборатории Минаева А.В. Минаев А.В. в то время купался в лучах славы. Во второй половине 1950-х годов была задана разработка реактивной кавитирующей торпеды РКТ-45 калибра 450 мм для оснащения торпедных катеров. По теме РКТ-45 в НИИ-1 Минсельхозмаша СССР под руководством Н.П.Мазурова был создан подводный аппарат с реактивным двигателем на твердом топливе (РДТТ) и диском-кавитатором в головной части. По совмещению РДТТ и системы самонаведения (ССН) велись работы, в которых главным конструктором был А.В.Минаев. Работы закончились успешно. На основе этих работ Минаев А.В. защитил кандидатскую диссертацию. Во время моего перехода в лабораторию Минаева А.В. у него было больше сорока сотрудников, специалистов в основном с университетским образованием, но все они были в, основном, теоретиками в области физики и математики. Прикладников, работающих с приборами, и могущих разработать необходимые блоки, для исследования процессов, в лаборатории не было. Поэтому Чернов И.В. и я пришлись в то время «ко двору». Для знакомства с текущими проблемами, которые в то время решала лаборатория, мне выделили руководителя группы - Гарбузова В.И. Сотрудники ЦНИИ 173 проводил в то время на Ладожском озере очередные морские испытания комплекса по теме «Дельфин 2». Головным разработчиком комплекса был отдел 36, возглавляемый Персицем З.М. Персиц З.М. работал в ЦНИИ 173 со дня его образования и являлся крупным специалистом как в области развития теории автоматического регулирования, так и в области создания систем управления. Сочетание талантов ученого и организатора позволили З. М. и возглавляемый им отдел разработать и внедрить в эксплуатацию ряд комплексов. За что получил Ленинскую премию и звание «Лауреат Ленинской премии». В составе отдела комплексными вопросами по теме «Дельфин 2» занималась лаборатория Удовенко Г.С, а вопросами управления процесса наведения и созданием счетно-решающего прибора комплекса – лаборатория Заказновой В.П. Персиц З.М, узнав о том что в лаборатории Минаева появились специалисты с практикой работы в области гидроакустики и электромеханики, попросил Минаева А.В. уступить одного специалиста и перевести его в лабораторию Заказновой В.П. Так я, проработав у Минаева А.В. три дня, был переведен в лабораторию Заказновой В.П, в которой проработал с сентября 1968 года до апреля 1994 года (34 года).
17 сентября 1968 года был командирован на Ладогу, где прошли мои смотрины, как специалиста, Персицем З.М. и руководством лабораторий. Передо мной была поставлена конкретная задача, которая заключалась в создании тренажера оператора гидроакустика, участвующего в выстреле телеуправляемой торпедой. В управлении движением торпедой при работе ГАС в режиме АСЦ совмещение пеленгов на торпеду и цель приводит к потере контакта с целью ввиду «экранирования» слабого сигнала цели сильным сигналом торпеды, расположенной ближе к носителю – антенне ГАС. Потеря контакта с целью не позволяет управлять торпедой. Оценив актуальность и наукоемкость дальнейшей работы, я спросил о перспективе написания диссертации на соискание кандидата технических наук, на что Персиц З.М. ответил: «после сдачи на снабжение тренажера я не буду возражать». Так начался мой период создания тренажера. Обладая широкой эрудицией Персиц З.М. предложил мне не заниматься поисками пионерских решений в создании тренажера и не заниматься изобретением «велосипеда», а изучить, что есть уже по тренажерам для тренировки операторов гидроакустиков в ВМФ. Для этого мне в помощь был определен капитан первого ранга, он был членом государственной комиссии – Мицкевич А. с его помощью в Ленинграде я посетил тренажерный зал ВОЛСОК и подразделение в/ч 10729, которым командовал капитан 1 ранга Рааль В.Ю. Ралль В.Ю. курировал инженерно-технических работников промышленности, связанных с разработкой тренажеров и боевого использования РТС ВСОК ВМФ. Из бесед со специалистами его отдела стало очевидно, что для наших целей необходимо было разрабатывать мобильное изделие без привязки к конкретной ГАС, имея ввиду перспективу использования телеуправляемых торпед на разных носителях, использующих разные типы ГАС. Такой подход определил структуру и алгоритм использования тренажера. Тренажер должен был иметь блок задания координат движения всех участников процесса, устройство имитации шумов разных целей и торпеды, устройства, имитирующее функции ГАС и устройства оценки работы оператора гидроакустика. В результате исследований, проведенных в эскизном проекте, было выяснено, что наиболее рациональный способ подготовки специалистов это - обучение оператора гидроакустика на электронном тренажёре, который имеет широкие возможности по имитации реальной обстановки действий боевых и технических средств ВМС. Конечной задачей эскизного проекта была разработка учебной техники для эффективной подготовки оператора гидроакустика при стрельбе телеуправляемыми торпедами.
Основным преимуществом создание электронного тренажёра должна была стать значительная экономия финансовых средств в ходе обучения и тренировки. В этом случае затраты на разработку, производство и установку тренажёрного оборудования быстро окупятся. Кроме того, при таком методе обучения личный состав значительно быстрее овладевает навыками работы на ГАС, при стрельбах телеуправляемой торпедой, и спецификой управления торпедной стрельбы, а также приобретает самостоятельность при принятии решений в сложных условиях боевых действий на море. Обучение на тренажере должно было позволить проведение непрерывного контроля за ходом и качеством подготовки оператора и многократное повторение того или иного маневра или тактического приёма, до полного его усвоения. После обучения должно быть предусмотрено проведение наглядного разбора допущенных ошибок. Тренажёр должен иметь возможность быть установленным на кораблях, в военно-морских базах, что позволит совершенствовать ранее приобретенные навыки путём систематических тренировок операторов гидроакустиков, а также воспроизводить действия гидроакустиков при разборе учений. Гидроакустический тренажер по принципу действия должен воспроизводить гидроакустическую информацию шумов цели, записанную на магнитную ленту, и шумов телеуправляемой торпеды в процессе наведения. Кроме того, тренажер должен иметь мобильность, обеспечивающую тренировку гидроакустиков непосредственно на корабле для поддержания уже достигнутого ими уровня подготовленности. Тренировка оператора должна была производится без включения ГАС на излучение и могла осуществляться в море и в базе. В современных условиях война на море уже не может быть выиграна только за счет лучшей оснащенности и количественного превосходства сил. Успех действий зависит также от степени подготовленности оператора гидроакустика при торпедной стрельбе, который должен не только хорошо знать материальную часть изделия, его особенности применения, но и обладать навыками по их боевому использованию, доведенными до автоматизма. В эскизном проекте необходимо было решить задачу определения принципов функционирования и методов построения тренажера, способного обеспечить максимально высокую эффективность обучения оператора гидроакустика стреляющей ПЛ телеуправляемыми торпедами. Для анализа физиологических и психологических процессов в деятельности оператора гидроакустика при стрельбе телеуправляемой торпедой было привлечено предприятие ОКБ БИМК, во главе с Ахутиным В.М. Ахутин В.М. в 1964 году организовал и возглавил первую в стране научно-исследовательскую лабораторию биомедицинской кибернетики, которая с 1968 года была преобразована в Особое конструкторское бюро биологической и медицинской кибернетики (ОКБ БИМК), а затем — в Научно-исследовательский конструкторско-технологический институт биотехнических систем, директором которого он являлся до конца жизни. ОКБ БИМКом были исследованы специфические психо-физиологические процессы при работе оператора гидроакустика и разработана методика, основанная на современных методах проведения тренинга и оценки подготовленности обучаемого, предложены методы, основанные на полной автоматизации процесса формирования имитационной моделирующей среды и её программной реализации. Так как работа оператора ГАС отличается исключительной напряженностью и ответственностью, а так же сильным эмоциональным напряжением, предложено было отбирать в качестве операторов ГАС волевых, технически грамотных, вполне овладевших навыками работы в сложных условиях людей. Каждый человек по своей природе индивидуален и поэтому выполнение той или иной работы зависит от его интеллекта и физических способностей. Для выявления пригодности к выполнению стрельбы телеуправляемой торпедой и должен был служить профессиональный отбор на тренажере среди моряков гидроакустиков по результатам оценки их работы. Созданный на предприятии ЦНИИ 173 макет тренажера для тренировки оператора-гидроакустика при стрельбе телеуправляемыми торпедами прошел проверку в в/ч города Лиепая при сдаче изделия Государственной комиссии. Работы по тренажеру были завершены в срок, и на их основе было выдано техническое задание для разработки конструкторской документации (РКД). По результатам работ при создании РКД тренажера оператора гидроакустика при стрельбе телеуиравляемыми торпедами с ПЛ мной было написано несколько статей в отраслевой журнал ВОТ (Вопросы оборонной техники) и в 1977 году получено авторское свидетельство на устройство.
Поделиться262020-03-03 11:30:08
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
Разработка комплекса противолодочного вооружения «Стриж-К» велась с 1966-х годах. ЦНИИ 173 разрабатывал систему телеуправления по этой теме для авиационной торпеды АТ-1. Головным разработчиком была лаборатория Горина В.И., которая входила в состав отдела 36, руководимого Персицем З.М. Управление и наведение торпедой решено было проводить по однопроводной линии связи - кабель-тросу, разматываемому с двух катушек - на вертолете и на торпеде. Наведение торпеды на ПЛ-цель проводилось по методу трех точек до момента захвата цели системой самонаведения (ССН). После захвата цели ССН торпеда наводилась по командам от ССН. Носителями торпед были противолодочные вертолеты: Ка-25ПЛС, Ка-27ПЛ, Ми-14ПЛ, оснащенные опускаемой на кабедь тросе гидроакустической станцией. Поисково-прицельные системы вертолетов, в состав которых входят гидроакустические станции, позволяли получать информацию о подводной обстановке в виде пеленга и дальности до цели и элементах ее движения. Это обстоятельство позволило разработать для вертолетов противолодочные торпеды с телеуправлением, имея в виду возможность их применения из режима висения. При сбросе и погружении торпеды ее парашютная система отделяется, с помощью крыльев она выводится из «мешка», после чего последние отстреливаются. Приборы управления выводят торпеду на заданную глубину для управления и поиска. На глубине 20 м срабатывают гидростатические механизмы контактного взрывателя и через 25 секунд с момента включения электросхемы торпеды срабатывает дистанционный предохранитель аппаратуры самонаведения, и она приходит в боевое положение. Выйдя на заданную глубину, торпеда начинает выполнять наведение на ПЛ-цель по методу трех точек. Достоиинством метода является сравнительно простая приборная реализация устройств измерения координат ПЛ-цели, расчета координат движения торпеды в счетно-решающем приборе телеуправления. По этому методу нет необходимости измерения дистанции до цели, нужен только пеленг. Во время проведения практических стрельб с вертолета было несколько неудачных пусков, что заставило главного конструктора – Персица З.М. искать причины неудач или пробовать другие варианты наведения торпеды и их реализацию. К этому моменту по другому комплексу «Дельфин 2» были получены хорошие результаты при практических стрельбах в в/ч города Лиепая. Метод наведения в комплексе «Дельфин 2» был несколько другим. Телеуправляемая торпеда наводилась на ПЛ-цель по методу совмещения пеленгов цели и торпеды при стрельбе в упрежденную точку. Работы по этому методу и его приборную реализацию проводила лаборатория Заказновой В.П. После обсуждения сложившейся ситуации Персицем З.М. было принято решение: для телеуправления по комплексу «Стриж-К» разработать и изготовить макетный образец счетно-решающего прибора (СРП-Стриж), в котором реализовать метод наведения по совмещению пеленгов цели и торпеды, для дальнейшей установки макета на вертолет. Макет СРП-Стриж должен был состоять из двух блоков – блока сопряжения (БС) и электромеханического счетно-решающего прибора (СРП). Ведущим по БС был назначен я, а по СРП – Туровцев В.И. Разработку приборной части по теме «Стриж» мы начали с учетом предыдущих работ отдела 36. Для телеуправления была принята схема проводной линии связи, построенная на одновременной двусторонней размотке провода из катушки, размещенной в торпеде, и катушки, буксируемой за ПЛ-носителем. К этому времени системой телеуправления были оснащены торпеда типа СЭТ-53М, в 1969 году принятая на вооружение под индексом ТЭСТ-68. В 1971-м была создана торпеда ТЭСТ-71 на базе более современной торпеды СЭТ-65, затем - торпеда ТЭСТ-71М, вертолетная телеуправляемая торпеда ВТТ-1 на базе торпеды АТ-1. Поисково-прицельные системы вертолетов, в состав которых входят гидроакустические станции, позволяют получить информацию о подводной обстановке в виде пеленга и дальности цели и элементах ее движения. В связи с этим, возникла идея разработать управление торпедой по уже опробованному методу совмещения пеленгов цели и торпеды. Было решено доработать состав вертолетной и бортовой аппаратуры телеуправлении. Для повышения точности попадания в цель система телеуправления должна комбинироваться с ССН, обеспечивающей увеличение точности наведения на конечном участке сближения торпеды с целью. Команды управления, формируемые в виде электрических сигналов на носителе, передаются в торпеду с помощью проводной линии связи. На вертолете размещены гидроакустический комплекс, предназначенный для обнаружения цели и определения элементов ее движения. Определение текущих координат торпеды было решено определять методом счисления в электро-механическом счетно-решающем приборе, находящимся на борту вертолета. Координаты цели вводятся в счетно-решающий комплекс, который по этим данным вырабатывает текущий курс торпеды, обеспечивающий ее вывод в зону цели. Команды управления, вырабатываемые счетно-решающим комплексом, поступают в пульт управления и после преобразования в электрические сигналы и их усиления передаются в торпеду по проводу. Здесь сигналы управления вновь усиливаются, преобразуются в командные напряжения и подаются на прибор курса. Прибор курса (ПК) приводит в действие рулевую машинку, которая перекладывает рули, в результате чего торпеда изменяет свой курс. Команды передаются в виде импульсов тока низкой частоты: одному импульсу соответствует изменение курса торпеды на 2...5°. Во время движения провод разматывается с торпедной катушки. В системе телеуправления «Дельфин 2» информация о положении корабля-цели относительно торпеды анализируется на атакующем корабле В торпеде имеется только система управления, которая обеспечивает корректировки курса торпеды по командам, передаваемым с атакующего корабля по проводам. Координаты цели, торпеды, а также курс и скорость атакующего корабля вводятся в счетно-решающий комплекс, который по этим данным вырабатывает курс торпеды, обеспечивающий ее встречу с целью. Телеуправление обеспечивает более высокую вероятность поражения цели по сравнению с другими способами управления и менее подвержено воздействию преднамеренных помех. Точность наведения торпеды зависит в основном от дистанции до цели и величины ошибок в определении ее координат гидроакустическим комплексом и координат торпеды, которые вычисляются в счетно-решающем приборе. При дальности стрельбы около 10 км торпеда может отклониться от цели на несколько сотен метров. При подходе к цели по проводу подается сигнал перевода торпеды в режим поиска АСН (режим автономного самонаведения). В дальнейшем торпеда управляется только по командам АСН. Важную роль при телеуправлении играет линия связи между торпедой и носителем. Основное назначение такой линии - обеспечить возможность двухсторонней передачи информации (команд, сигналов) между носителем и торпедой. В «Дельфине 2» хорошо себя зарекомендовала линии связи для телеуправляемых торпед - одножильный кабель с использованием морской воды в качестве второго проводника. При реализации метода наведения примененного в комплексе «Дельфин 2» решено было всю математику использовать в «СРП-Стриж». Но по весовым характеристикам, образцы изготовленные для «Дельфин 2», не подходили. Решено было применить для изготовления механических узлов вместо стали алюминиевые сплавы, а в следящих системах миниатюрные электродвигатели. В БС применить микросхемы типа «Тропа» или им подобные. По проведенным предварительным расчетам и макетированию было составлено ТЗ (техническое задание), которое передали на завод-изготовитель «Молот» в Петровск Саратовской области. При изготовлнеии на заводе дифференциалов и интеграторов, состоящих из шестерен из алюминиевых сплавов, возникла проблема при сдаче ОТК обеспечения точности при сдаче механизмов (выполнение заданных норм на момент трогания и величины холостого хода). Проблема была решена применением упрочнения сплава методами особой температорной выдержки после изготовления узлов. Командировка почти всего состава лаборатории Заказновой В.П. в течении семи месяцев на заводе «Молот» принесла результат. Два макетных образца заводского изготовления были готовы и отправлены в ЦНИИ 173 для проведения полунатурных испытаний. Испытания проводились в стендовом зале с использованием в качестве модели торпеды аналоговой электронно-вычислительной машины «Электрон». После положительных результатов электронных пусков телеуправляемой торпеды, с использованием БС и «СРП-Стриж», встал вопрос замены на Государственных испытаниях аппаратуры, разработки лаборатории Горина В.И. Но, случилось так, что несколько удачных пусков в городе Феодосия позволили принять Государственной комиссии решение о принятии на снабжение вариата с аппаратурой Горина В.И.
Сложившаяся ситуация во взаимоотношениях лабораторий внутри отдела Персица З.М. привела к тому что была произведена укладка проекта «СРП-Стриж», на полку, для использования в дальнейших ОКР.
Так, имея большие амбиции и еще большие разочарования, мной была предложена работа по созданию комплекса телеуправления для любых плавучих средств, имеющих ГАС, где возможно использовать торпеду с телеуправлением «ТЭСТ-2», БС (блок сопряжения) и изделие «СРП-Стриж». Идея была высказана представителю МТУ – капитану 1 ранга Шерелю В., на что тот ответил, что это будет нарушением Конвенции о запрете иметь оружие на судах не входящих в состав Вооруженных Сил.
Поделиться272020-03-03 11:31:09
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
Мои телеуправляемые торпеды для МПК 1124
Вадим Милованов
Успехи отдела № 36 в предыдущих работах: «Дельфин 2» и «Стриж» - комплексах управляемых по проводу противолодочных торпед, явились предпосылкой работ связанных с размещением управляемых торпед, теперь на надводных кораблях.
Постановлением ЦК КПСС и Совета министров СССР № 680—280 от 10 августа 1964 года было принято решение о строительстве малого противолодочного корабля проекта 1124. Технический проект 1124 по результатам испытаний головного корабля в 1970 году был откорректирован и окончательно оформлен в 1972 году. Гидроакустическое вооружение ГАС опускаемая МГ-339 "Шелонь" с антенной расположенной в подъёмно-опускном устройстве (ПОУ), находилась в кормовой надстройке и работала в режимах эхо – и шумопеленгования, обеспечивая на стопе поиск подводной цели. Опускалась на глубину до 100 метров и могла обнаруживать подводную лодку идущую на глубине на дальности от 2 до 15 км. При обнаружении лодки на стопе в точке корабельного противолодочного дозора (КПЛД) корабль на полной скорости с поднятой станцией МГ-339 "Шелонь" шёл в точку рандеву с лодкой, с последующим её до поиском и атакой при помощи подкильной ГАС МГ-335 "Платина".
ГАС подкильная МГ-335 "Платина" с антенной расположенной в подкильном обтекателе и работала в режимах эхо и шумопеленгования. Гарантированная дальность сопровождения подводных целей составляла 2 км, а максимально возможная дальность сопровождения (при нормальных гидрологических условиях) до 15 км. Дальность обнаружения в режиме шумопеленгования достигала до 4—6 км, а дальность обнаружения мин и торпед до 3 км. «Мёртвая зона» при работе составляла 1,5 — 2,0 км. ГАС обладала помехоустойчивостью и могла применяться на больших скоростях хода корабля. Время подготовки станции к работе- 5 минут.
Торпедное вооружение кораблей проекта состояло из двух двухтрубных поворотных торпедных аппаратов марки ДТА-53-1124, установленных по бортам позади носовой надстройки. Торпедные аппараты комплектуются дистанционным автоматическим устройством ввода в торпеды текущего угла (АТУ.1) и имеют воздушную систему стрельбы. Перед стрельбой торпедные аппараты разворачиваются на фиксированный угол в 27°. Стрельба из аппаратов должна была производиться как противокорабельными торпедами марки 53-65К или противолодочными марок СЭТ-53, СЭТ-53М и СЭТ-65.
По ТТЗ на КТУ-77 "Терек" корабли проекта 1124М необходимо было оснастить комплексом телеуправляемого оружия. Выстрел необходимо было производить торпедой ТЭСТ-3, которая представляла собой доработанную торпеду ТЭСТ-71. Электрическая торпеда ТЭСТ-3 имела дальность хода 15-20 км, скорость 25 и 40 узлов, глубину хода 20-400 м, а также переключение скоростей для уменьшения её собственного уровня шума. Дальность хода торпеды 20 км достигалась при условии 50 % времени её движения со скоростью 23-25 узлов. Длина провода в торпедной катушке для телеуправления равна 20 км, в корабельной катушке - 5 км. Система самонаведения торпеды - акустическая, активно-пассивная, двухплоскостная, с радиусом реагирования 1000 м по активному каналу. Неконтактный взрыватель - гидролокационный, кругового действия, с радиусом реагирования 10 м.
Имея хороший научно-производственный задел, а также, установившуюся кооперацию с производственными предприятиями, Персицем З.М. было принято решение - выполнить эскизный проект в короткие сроки и перейти к рабочему проектированию. На очередном техническом совещании мной была предложена блочно-функциональная схема комплекса с учетом последних работ лаборатории Заказновой В.П. по вертолетному комплексу «Стриж»-СРП. Облегченный вариант СРП с применением шестеренок из алюминиевого сплава делал весо-габаритные характеристики аппаратуры управления стрельбой, расположенной на носителе, выигрышными при размещении. Весовой выигрыш доходил до 6оо килограмм на весь комплекс КТУ-77 "Терек". К тому же на заводе «Молот» было изготовлено два образца счетно-решающих приборов, которые были в нашем распоряжении. После недолгих раздумий Персиц З.М. высказал простую мысль: «Если Вы думаете что величина правительственных наград за наши работы обратно пропорциональна весам и габаритам иаших комплексов, то вы ошибаетесь и, во-вторых, за копирование наград не дают». Проверенная технология изготовления счетно-решающих приборов на шестеренках из стали, и, многолетний опыт проектирования интегрирующих и дифференцирующих механизмов в СКБ города Петровск на заводе «Молот» стали основой для выдачи ТТЗ на СРП-«Терек», основной приборной части комплекса КТУ-77 "Терек", расположенной на носителе МПК проекта 1124М.
За основу комплекса была положена функциональная схема комплекса «Дельфин 2», в несколько измененном составе. Вместо «СРП-Дельфин» необходимо было разработать новый счетно-решающий прибор - СРП-«Терек» и, вследствии нового алгоритма предстартовой подготовки применения торпед, разработать новые приборы: - прибор анализа и управления (ПАУ) и цифро-буквенное табло рекомендаций и текущего состояния (ТРТС). На пульте командира при управлении (ПКУ) торпедной атакой были предусмотрены два режима использования комплекса: режим ручного управления и - автоматического управления. Для проведения работ по комплексу были назначены ведущие:
- по комплексным работам – Каткова Н.А. (лаборатория Удовенко Г.С.);
- по счетно-решающему прибору (СРП-«Терек») – Новиков В.И. (лаборатория Заказновой В.П.);
- по прибору анализа и управления (ПАУ) и цифро-буквенному табло рекомендаций и текущего состояния (ТРТС) – Милованов В.К. (Ваш покорный слуга, лаборатория Заказновой В.П.).
Создание корабля пр.1124 как специализированного скоростного противолодочного корабля небольшого водоизмещения было обусловлено появлением за рубежом подводных лодок нового поколения и необходимостью принятия эффективных мер противодействия им во всех морских зонах, в том числе и в прибрежных районах, вблизи военно-морских баз и пунктов базирования кораблей ВМФ СССР. Разработку зскизного проекта и изготовление первых образцов малого противолодочного корабля (МПК) пр.1124 "Альбатрос" проводило ЦКБ-340 города Зеленодольск. К моменту разработки рабочего проекта комплекса - «КТУ-77» МПК 1124М имел в своем составе: - ГАС с антенной в подкильном обтекателе «Платина-С» и подруливающим устройством «Поворот-159», которое обеспечивало управление кораблем во время использования ГАС «Шелонь-Т» на стопе;
- два торпедных аппарата, для стрельбы самонаводящимися торпедами.
Для внедрение в структурную схему МПК проекта 1124М «Альбатрос» аппаратуры КТУ-77 (комплекс телеуправления) с корабля сняли РБУ-6000 с боезапасом и сократили запасы топлива. Были внесены изменения и в торпедные аппараты, для их использования под стрельбу телеуправляемой торпедой ТЭСТ-3. Общий вес всех приборов комплекса телеуправляемого оружия КТУ-77 с торпедами ТЭСТ-3, размещаемых на (МПК) проекта 1124М «Альбатрос», составил 1200 кг. Вновь были разработаны прибор анализа и управления (ПАУ) и цифро-буквенное табло рекомендаций и текущего состояния (ТРТС). Телеуправление торпедой по проводной линии связи обеспечивает высокую вероятность поражения цели по сравнению с другими способами управления и мало подвержено воздействию преднамеренных помех. В связи с этим применение телеуправляемых торпед приобретает определенное значение в системе вооружения надводных кораблей. Так как в систему управления включен оператор стрельбы, то облегчается скрытная доставка торпеды в район цели на дальность наиболее эффективной работы ее ССН, а также контролирование и адекватное реагирование на естественные и искусственные помехи при наведении. На случай обрыва линии связи управление торпедой идет по заранее запрограммированному курсу, а переход в режим самонаведения по последним достоверным данным о предполагаемом месте нахождения цели. Телеуправление позволяет передавать команды управления с борта стреляющего корабля и получать обратные данные о параметрах торпеды. Это дает оператору возможность управлять торпедой в зависимости от маневрирования цели, повторять атаку в случае промаха или перенацеливать ее на другую цель. В алгоритм работы комплекса была включена ситуация получения целеуказания по радио от других источников. Во вновь разрабатываемые прибор анализа и управления (ПАУ) и цифро-буквенное табло рекомендаций и текущего состояния (ТРТС) были заложены функции автоматической выработки команд управления торпедной стрельбы без участия человека. А, это - уже цифровая вычислительная машина (ЦВМ), которая берет управление на себя, для этого перед выстрелом торпеды на пульте ПКУ устанавливается переключатель в положение - автоматического управления.
. Перед выстрелом в торпеду расположенную в торпедном аппарате вводят исходные расчётные данные до атакуемой цели в аналоговом виде. После выхода торпеды из торпедного аппарата и запуска электродвигателя постоянного тока, она начинает движение в сторону цели. Корректирование торпеды по курсу и глубине, на атакуемую цель, производится по проводу комплекса телеуправления в цифровом виде. Комплекс телеуправления по проводу обеспечивает в сложной помеховой обстановке вывод торпеды на цель в зону действия системы самонаведения и учитывает все изменения поведения цели. С выходом торпеды в зону действия системы самонаведения, её универсальная гидроакустическая аппаратура осуществляет поиск и захват атакуемой цели, что передается по линии связи, через устройство согласования в прибор анализа и управления (ПАУ), который, исходя из текущей ситуации, дает разрешение торпеде на переход в режим ССН, обеспечивая выход торпеды на цель. Как только торпеда входит в зону действия неконтактного взрывателя, происходит подрыв заряда БЧ и поражение атакуемой цели.
В 70 годы данные от ГАС, а также курс и скорость атакующего корабля, которые были необходимы для стрельбы, вводились в комплекс телеуправления в виде аналоговых величин (донные от сельсинов, синосно-косинусных вращающих трансформаторов – СКВТ, ЛВТ), которые неоходимо было преобразовать в цифровую форму для ввода их в цифровой анализатор выработки команд управления торпедным выстрелом, и цифро-буквенное табло отображения. Прибор анализа и управления (ПАУ) и цифро-буквенное табло отображения рекомендаций и текущего состояния (ТРТС) представляли собой комбинацию электронно-механических блоков: входных устройств сопряжения, цифрового анализатора выработки команд управления, и цифро-буквенного табло отображения рекомендаций и текущего состояния.
Блок входных устройств представлял собой набор преобразователей угловых данных в унитарный многоразрядный десятичный код. Преобразователи строились по принципу следящей системы, которая отслеживала угол поворота датчика данных. Использовалась элементная база – германиевые транзисторы МП26Б, диоды Д 814, Д101Б, резисторы ОМЛТ, конденсаторы БМ и шаговый двигатель ШДА-1ФК. Частота вращения и суммарный угол поворота вала шагового электродвигателя ШДА-1ФК пропорциональны соответственно частоте и числу поданных импульсов управления. При отсутствии управляющих импульсов электродвигатель находится в режиме фиксированной стоянки и сохраняет конечные результаты предыдущих перемещений. Привод с шаговым электродвигателем сочетает возможности глубокого регулирования частоты. Унитарный код соответствующий количеству импульсов управления шаговым двигателем передавался на выход преобразователя.
Цифровой анализатор выработки команд управления состоял из набора декадных регистров, построенных на управляемых тиристорах КУ101Б. К каждому регистру был подключен дешифратор в виде диодной матрицы на диодах Д101Б. Сборка диодной матрицы заканчивалась злектромеханическим реле РЭК24. Реле герметичное, малогабаритное, в металлическом корпусе. Выпускалось в климатических исполнениях по ГОСТ 15150–69: УХ. Контакты которого формировали команды, идущие на цифро-буквенное табло отображения рекомендаций и текущего состояния торпедного выстрела.
Цифро-буквенное табло отображения рекомендаций и текущего состояния торпедного выстрела состояло из двух линеек, каждая из которых представляла десять цифробуквенных знакомест, представляющих собой строку. Для знакомест использовались индикаторные лампампы ИН 23. ИН 23 - сегментный индикатор тлеющего разряда, предназначенный для преобразования электрических сигналов в синтезированное изображение цифр, букв и знаков. Катоды — в виде сегментов, образующих арабские цифры, буквы русского и латинского алфавитов и другие знаки. Индикация производится через боковую поверхность баллона. Для отображения команды или текущего состояния выстрела каждая линейка подключалась к формируемой команде через дешифратор, выполненный на диодной матрице, с использованием диодов Д101Б.
Для 70 годов такое нагромождение электромеханики, транзисторов, тиристоров, трансформаторов и индикаторных ламп с тлеющим разрядом в комплексе телеуправления торпедой было оправдано в виду применения жестких климатических требований к образцам военной техники. Внедрение микросхем было тогда в начальной стадии. Современность и новизна схемных решений была подтверждена получением Миловановым В.К., вашим слугой, четырьия авторскими свидетельствами - №№ 53479, 66256, 84266, 112801. Денег, полученных в качестве вознаграждения, от предприятия п/я В 2331, хватило на постройку двухэтажного брусового дома 6х7,5 мм на дачном участке СНТ «Виктория».
Работа в ЦНИИАГ увлекала меня предоставленной свободой выбора методов и способов решения поставленных задач. Особенно теплые воспоминания оставили взаимоотношения с начальником отдела, а затем начальником направления (НТО 6) - Персицем З.М. Он не чурался выслушать мнение альтернативное общевысказанному. Меня он звал по этому поводу «альтернативщик». Работа в институте располагала к научной деятельности, но случалось так, что когда наступало время окончания очередного напряженного этапа по теме, Персиц З.М. предлагал мне попробовать реализовать его идею, которая как он обещал потянет не на одну кандидатскую диссертацию. И выбор темы диссертации откладывался на «потом». Дело в том, что отдел разрабатывал в основном НИРовские темы, которые затем переходили в опытно-конструкторские работы и далее, когда приходило время изготовления установочной партии изделий на заводах-изготовителях необъятной нашей Родины, ведущие инженеры, как правило, сидели в командировках по нескольку месяцев, пока не выпускались приборы в нужном количестве. А первые образцы на заводах-изготовителях в то, переходное время, по технологиям и быстроменяющейся элементной базе было сдать заказчику очень трудно. Технические устройства, которые должны были серийно выпускаться и использоваться должны были изготовляться на заводах, приниматься отделами технического контроля и представителями от МО СССР. Чертежи необходимо было сопровождать большим количеством технической документации: технические условия (по которым устройство должно приниматься ОТК), техническим описанием, инструкцией по регулированию на каждый блок и инструкцией по эксплуатации, паспортом, формуляром. Приведу один пример. Для изготовления первой заводской партии приборов в 1974 году комплекса КТУ «Терек» был определен завод «Физприбор» (п/я В 2331) города Фрунзе Киргизской ССР. Одних типов мечатных плат с навесными элементами было 27 штук. Печатные платы были размером 10 см на 20 см. Количество навесных активных элементов (транзисторы, тиристоры, диоды, стабилитроны, трансформаторы) было в КТУ «Терек» около 12000 штук. Все это надо в изготовленных приборах проверить и сдать заказчику. На заводе «Физприбор» города Фрунзе Киргизской ССР в то время работало в цехе, где шло изготовление блоков, работало 40 монтажников, их количества не хватало для выполнения работы в срок. Тогда я предложил Персицу Э.М. через наше отраслевое министерство попросить монтажников из других предприятий отрасли. Идея сработала и «Физприбор» получил на 30 дней 27 монтажников. Работа была выполнена в отведенный срок.
После успешного завершения Государственных испытаний заводского образца комплекса КТУ-77 "Терек" и проведенной доработки опытного образца по откорректированной документации заказчиком было принято решение о поставке комплекса на снабжение.
За работы по внедрению комплексов телеуправляемых по проводу торпед на подводных, надводных и воздушных носителях руководителям работ были присуждены Государственные премии и Государственные награды СССР. Решением Правительства СССР 6 января 1984 года я был награжден медалью «За трудовое отличие».
Поделиться282020-03-04 20:45:38
Общался с сослуживцем.
Рассказал как первыми на ТОФ применяли АПР-1.
77 ОПЛАП ДД.
1975 г. Ил-38. Командир Степанов.
Штурман Гащук.
Второй штурман Доломан.
Третий штурман Сурин.
Бросали две по 641-й лодке. Обе навелись.
Поставили барьер, потом полукольцо. По ЭДЦ с выносом. Скорость лодки 6 узл.
Через неделю бросали боевую по имитатору. Флотоводы сказаои что попали, все в клочья
Особенность- малая дальность захвата ГСН,поэтому приходилось очень точно считать,чтоб хоть одна ракета попала в зону реагирования.
Рассказал Василий Доломан,сослуживец по Николаевке и КВФ.
Степанов умер. Третий штурман Сурин еще при мне погиб в декабре 1980. Поехали за елками для полка,машина перевернулась,придавило бортом. Помню как могилу ему копали,жгли куски колодок шасси магниевых,чтоб грунт прогреть.
Написал для информации. Чтоб память осталась.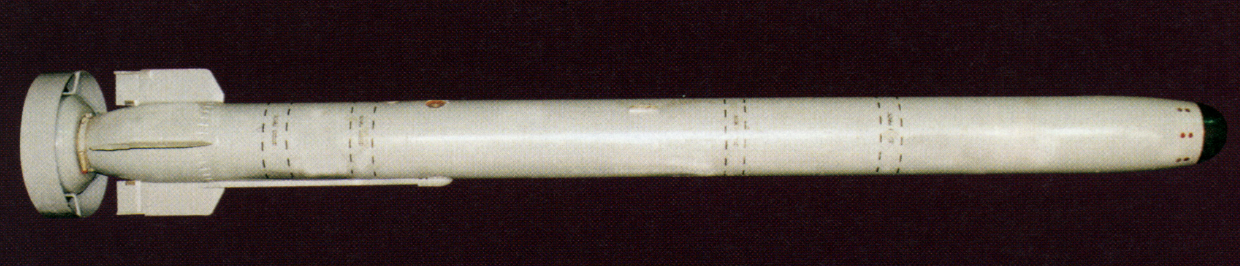
Отредактировано Polinom (2020-03-04 20:46:28)
Поделиться292020-03-04 21:30:53
- свой человек
- Зарегистрирован: 2010-05-10
- Сообщений: 7931
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Провел на форуме:
3 месяца 26 дней - Последний визит:
2026-07-18 11:31:57
Бросали две по 641-й лодке. Обе навелись.
Поставили барьер, потом полукольцо. По ЭДЦ с выносом. Скорость лодки 6 узл.
Через неделю бросали боевую по имитатору. Флотоводы сказаои что попали, все в клочь
лихо
надо будет у Бедая детали уточнить
вообще люди которые были на "мишени" (ПЛ пр.690) рассказывали о крайне неприятных ощущениях когда по ним работали АПР
Поделиться302020-03-04 21:45:45
лихо
надо будет у Бедая детали уточнитьвообще люди которые были на "мишени" (ПЛ пр.690) рассказывали о крайне неприятных ощущениях когда по ним работали АПР
Отчеты должны где-то сохраниться.
Отредактировано Polinom (2020-03-04 23:32:59)

